publications
publications in reversed chronological order.
2025
-
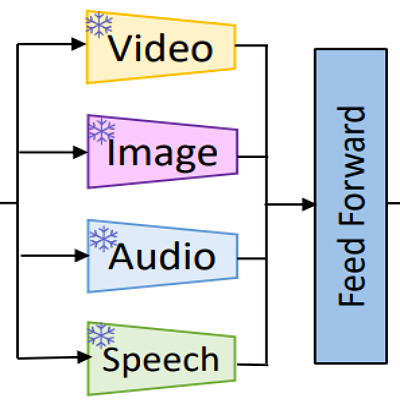
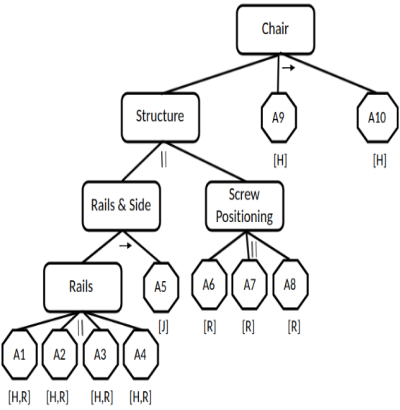
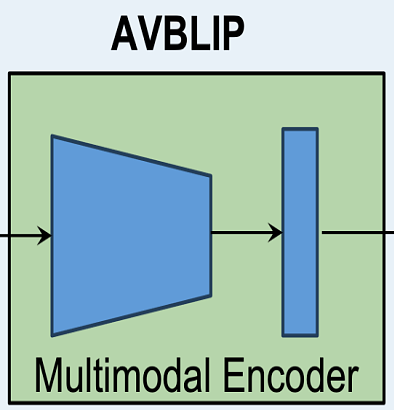
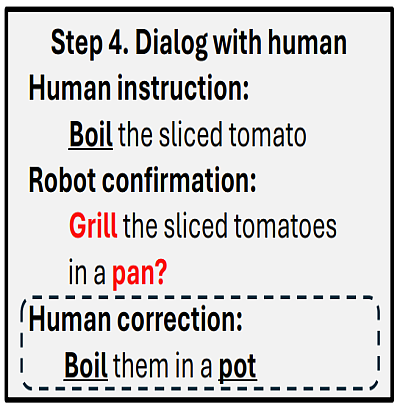 Robot Confirmation Generation and Action Planning Using Long-context Q-Former Integrated with Multimodal LLMIn IEEE Workshop on Automatic Speech Recognition and Understanding (ASRU), 2025: Large Language Models | Action Planning | Interactive Planning
Robot Confirmation Generation and Action Planning Using Long-context Q-Former Integrated with Multimodal LLMIn IEEE Workshop on Automatic Speech Recognition and Understanding (ASRU), 2025: Large Language Models | Action Planning | Interactive Planning


2024
-
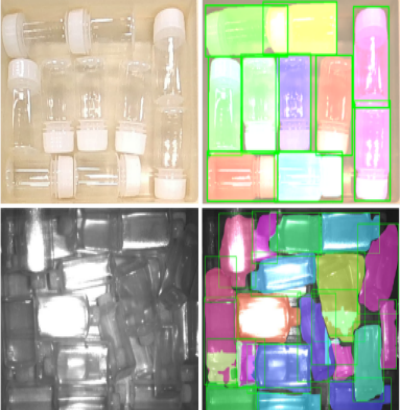
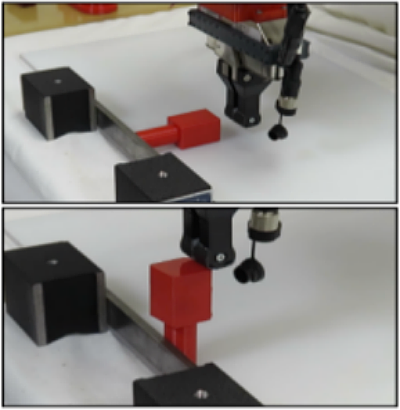
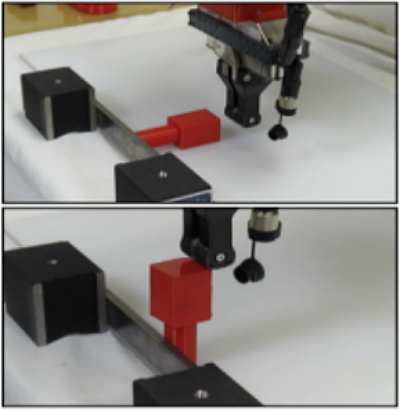
 Insert-One: One-shot Robust Visual-Force Servoing for Novel Object Insertion with 6-DoF TrackingIn Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024: Assembly | Robotic Insertion | Visual-Force Servoing | Robust Manipulation | Visual Tracking
Insert-One: One-shot Robust Visual-Force Servoing for Novel Object Insertion with 6-DoF TrackingIn Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024: Assembly | Robotic Insertion | Visual-Force Servoing | Robust Manipulation | Visual Tracking

2023
-
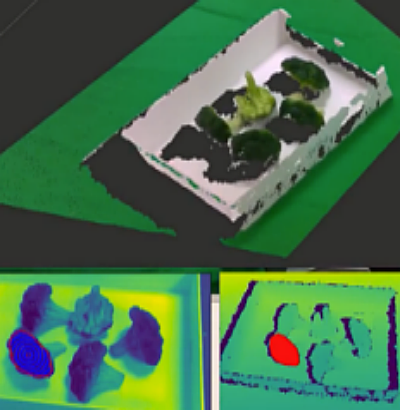
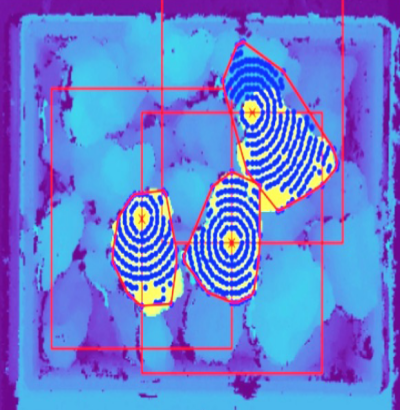
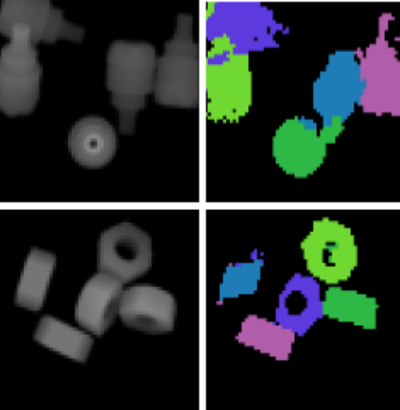
 EARL: Eye-on-hand Reinforcement Learner for Dynamic Grasping with Active Pose EstimationIn Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023: Dynamic Grasping | Reinforcement Learning | Pose Estimation | Closed-Loop Control | Visual Servoing
EARL: Eye-on-hand Reinforcement Learner for Dynamic Grasping with Active Pose EstimationIn Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023: Dynamic Grasping | Reinforcement Learning | Pose Estimation | Closed-Loop Control | Visual Servoing -
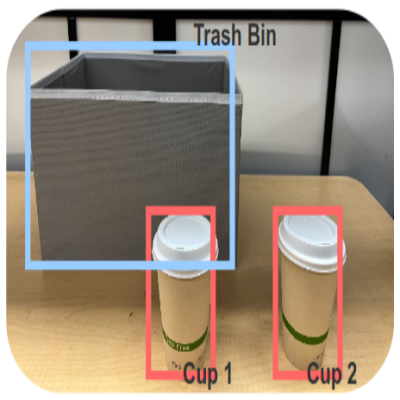
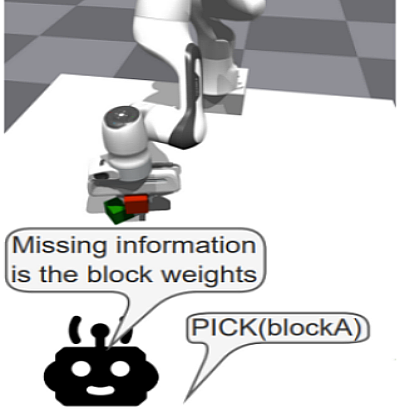 Interactive Planning Using Large Language Models for Partially Observable Robotics TasksIn Advances in Neural Information Processing Systems (NeurIPS) Workshop on Instruction Tuning and Instruction Following, 2023
Interactive Planning Using Large Language Models for Partially Observable Robotics TasksIn Advances in Neural Information Processing Systems (NeurIPS) Workshop on Instruction Tuning and Instruction Following, 2023

2022

2021

2020

2019
2018
2017
2016


2015
-
 Automated and Objective Assessment of Surgical Training: Detection of Procedural Steps on Videotaped PerformancesIn Proceedings of the International Conference on Digital Image Computing: Techniques and Applications (DICTA), 2015: Video-Based Assessment | Skill Assessment | Computer Vision
Automated and Objective Assessment of Surgical Training: Detection of Procedural Steps on Videotaped PerformancesIn Proceedings of the International Conference on Digital Image Computing: Techniques and Applications (DICTA), 2015: Video-Based Assessment | Skill Assessment | Computer Vision

