Siddarth Jain

sjain {at} merl[dot]com
Siddarth is a Principal Research Scientist at Mitsubishi Electric Research Laboratories (MERL). His research spans computer vision, machine learning, and robotics, with a focus on enabling autonomous systems to perceive, understand, and act in the physical world. He develops data-driven and geometric approaches for perception, manipulation, learning, and decision-making, with applications in human-robot collaboration and real-world automation. He also serves as an Associate Editor for IEEE Robotics and Automation Letters (RA-L).
He received his Ph.D. in Computer Science from Northwestern University in 2019. In collaboration with the Shirley Ryan AbilityLab, his doctoral research focused on perception and shared autonomy for assistive systems, combining algorithm development with user studies.
news
| Jun 01, 2026 | Presenting 2 papers at ICRA 2026, Vienna, Austria. |
|---|---|
| Nov 19, 2025 | We are hiring a Ph.D. student for Robot Learning / Perception internship. Please apply here. |
| May 19, 2025 | Presenting 2 papers at ICRA 2025. |
| May 19, 2025 | Serving as a session chair for Human-Robot Collaboration at ICRA 2025. |
| Oct 14, 2024 | Presenting 5 papers at IROS 2024. |
| May 13, 2024 | Presenting a live demo on Autonomous Assembly at ICRA 2024, Yokohama, Japan. |
| Jan 09, 2024 | Presenting a live demo at CES 2024, Las Vegas, USA. |
selected publications
-
 EARL: Eye-on-hand Reinforcement Learner for Dynamic Grasping with Active Pose EstimationIn Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023: Dynamic Grasping | Reinforcement Learning | Pose Estimation | Closed-Loop Control | Visual Servoing
EARL: Eye-on-hand Reinforcement Learner for Dynamic Grasping with Active Pose EstimationIn Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023: Dynamic Grasping | Reinforcement Learning | Pose Estimation | Closed-Loop Control | Visual Servoing -
 SplatCtrl: Perception-Action Coupling via Gaussian Scene Representations and Reactive Robot ControlIn Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2026: Gaussian Splatting | Collision Avoidance | Reactive Control | Motion Planning | Scene Reconstruction | HRI
SplatCtrl: Perception-Action Coupling via Gaussian Scene Representations and Reactive Robot ControlIn Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2026: Gaussian Splatting | Collision Avoidance | Reactive Control | Motion Planning | Scene Reconstruction | HRI -
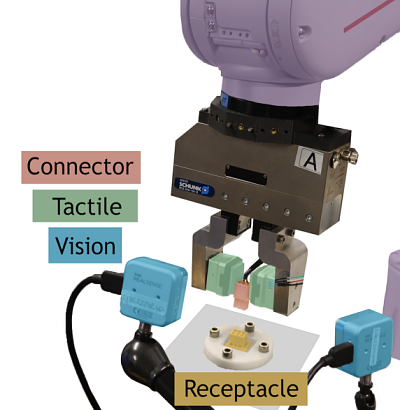
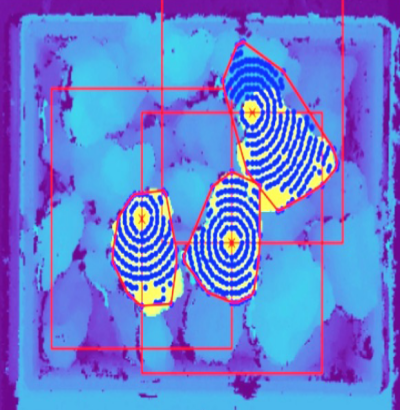
 Insert-One: One-shot Robust Visual-Force Servoing for Novel Object Insertion with 6-DoF TrackingIn Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024: Assembly | Robotic Insertion | Visual-Force Servoing | Robust Manipulation | Visual Tracking
Insert-One: One-shot Robust Visual-Force Servoing for Novel Object Insertion with 6-DoF TrackingIn Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024: Assembly | Robotic Insertion | Visual-Force Servoing | Robust Manipulation | Visual Tracking